



快捷导航
Quick Navigation
联系我们
为什么科学家非要搞“人形机械人”?有需要像
但到了2026年的第二届角逐,参赛步队就达到了102支,速度和不变性大幅提拔。此次的冠军仅用了50分26秒,而目前人类的世界记载是57分20秒(由乌干达活动员基普利莫创制),机械人快了近7分钟。这申明机械人续航衰减、关节过热、算法委靡等问题,都获得了不小的优化。
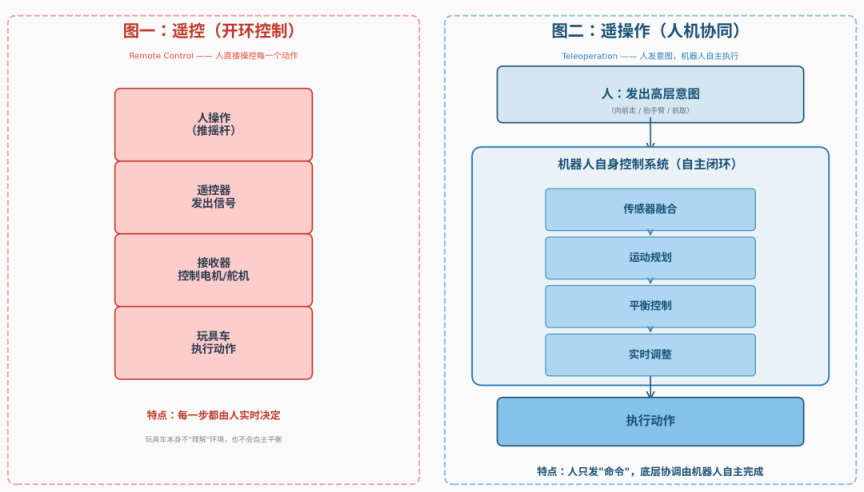
说白了,玩具车的遥控有点像提线木偶,木偶的胳膊腿上每一根线都间接连正在操做者手上,完成每个动做都需要人来精细操做。而遥操做则更像骑马——你夹马腹喊“驾!”、拽缰绳说“吁~”,发的是“跑”“停”的号令,但协调四条腿、连结均衡、奔驰或停下则是马本人正在做。

虽然工场里的固定机械臂能够配上公用夹具,拧螺丝的速度和精度远超工人,但这个夹具往往只能干这一件事;想让机械人换个使命,好比抽一张纸巾,拈起一朵花,或者给卧床白叟递一杯水,公用夹具就不益处理了。
所以,可别感觉机械人挑和极限是正在炫技,能打咏春、玩跑酷、完成半马的机械人,干起其他活来也会更逛刃不足。
最初,可能还有伴侣会质疑:“网上明明就有那么多机械人翻车视频,不正好申明这些机械人正在做秀吗?”其实,以前我们看不到机械人翻车,只不外是那时候它们又贵又笨沉,难以走出尝试室。现正在你能刷到各类翻车视频,恰好申明机械人曾经能被批量制出来,放进实正在世界里去测试、工做了。
举例来说,必需全程亲身遥控才能工做的扫地机械人必定没人想买,而至多现阶段,无人值守的全从动手术机械人生怕仍是难以获得患者信赖……由于的决策不克不及交给算法独自决定。
国内有个很是曲不雅的例子。2025年亦庄举办了首届人形机械人半程马拉松,其时参赛步队不外二十余支。良多机械人跑起来还踉踉跄跄、多次摔倒,最初仅有6支步队完赛,被不少网友冷笑。而其时的冠军耗时2小时40分42秒才跑完21公里,大致相当于实力比力弱的人类业余选手。
而跑酷、技击等高难度的动做,更容易摔倒、打滑。若是机械人能及时“反映过来”,连结均衡,那么正在现实下工做中碰着不测,也能更好地避免摔倒。总之,高难动做、极端,也更有帮于机械人各方面的问题,以便更快地改良。
正如活动员正在赛场上冲破极限,机械人跑酷、打拳以至赛马拉松,看起来像正在“炫技”,其实也是正在摸索本身的鸿沟。
这些现正在看起来有点狼狈的磕磕绊绊,恰好是机械人悄悄走进我们糊口的,也许要不了良多年,我们就会指着这些视频笑着对正正在忙活的家政机械人说:快来看看,你们小时候也老摔跤,就跟学走的小伴侣一样。

遥操做不只是当下完成复杂使命的常见体例,仍是锻炼机械人自从能力的主要数据来历。当前机械人范畴最头疼的问题之一,就是贫乏实正在世界的高质量操做数据。良多动做——好比天然地拧开门把手、从芜杂桌面抓起特定物品——对人来说垂手可得,但法则太难写,靠编程难以处理。

良多人一看到机械人死后拿着遥控器的操做者,就会立即联想到遥控玩具车,感觉一点都不高级。但机械人范畴里的“遥控”,其实更精确的说法是“遥操做”(teleoperation)——它是一套及时的人机协同系统,取遥控玩具车有着底子的分歧。
好比,工场地面可能有油渍,户外台阶可能结冰,搬运时可能被旁边的人撞一下——这些都不是通俗的尺度测试能笼盖的。若是机械人只正在受控里练过“尺度动做”,没人碰的环境下能够慢悠悠地不变,一旦碰到不测就摔倒、死机、需要人扶,那它永久没法实正上岗。
而这些马本人做的事,正在机械人里就是传感器融合、活动规划和及时均衡节制——操做者推一下摇杆,后台可能涉及几十个关节的毫秒级协同,手艺含量一点都不低。


其实,选择人形机械人的一个主要缘由并不是为了美妙,而是为了兼容人类曾经好的物理世界。人形机械人有一些活动上的劣势,由于从通道、阶梯到东西,良多工具都是为了人类利用便利设想的,身体布局雷同人的机械人。
人能走的道,人形机械人能够“抬脚就走”,而人能用的工具,具备工致手的人形机械人也能“上手即用”。终究人类世界的东西——从门把手、扳手、杯子到手机、键盘、药瓶——全都是按手掌尺寸、手指抓握习惯和力反馈来设想的。
没人感觉长儿摔却是失败,但对机械人,我们却往往不盲目地拿科幻片子里的完满抽象当尺子——终结者、贾维斯、变形金刚……这种“双标”背后,有三个关于机械人的常见,它们曾经快成了错误的标签,很晦气于公共准确认识当今的机械人手艺。
而具备多度、带触觉的工致手,最大的价值恰好是通用:它不需要为每一项新使命从头制一套公用东西,而是间接拿起人类现成的东西就能操做。换句话说,人形机械人加上工致手,相当于给机械人配了一套“全能接口”,让它能无缝利用所有的人类东西。
尝试室下,机械人其实处于一种比力可控和平安的——方圆相对简单、温度湿度适宜、很难碰着不测环境……这种,能更好地测试机械人的根基机能,进行可对照、可节制的尝试。可是,机械人不克不及只做温室里的花朵,它必将走出尝试室,复杂以至的现实工做。
具体来说,人节制遥控玩具车的时候,推杆,遥控器发出无线电信号,车上的领受器收到后,间接驱动电机和舵机运转。这个过程简单间接,电机转多快、标的目的拐几多,由人及时决定。玩具遥控车本身并不“理解”,也不会本人连结均衡、规划动做。
可能有的伴侣仍是想欠亨,机械人莫非不应从动运转吗?这种设法有点事理,但不敷全面,机械人的自从程度要跟使命婚配,不是需要人介入就不先辈。

想处理这个问题,人类能够先遥操做机械人完成这些动做,再把视觉消息、关节活动、接触力变化等数据完整记实下来,做为锻炼数据。良多机械人研发团队都正在采用这种“人正在回”(human-in-the-loop)的思:先由人完成操做并采集数据,再用这些数据锻炼机械人的自从策略。而通过从从臂遥操做,也能堆集工致手抓握数据,为后续自从操做打根本。
并且,正在这个方面,国产方案正在这里早就不只是“理论”了。2025年8月,正在合肥举办的第二十七届中国机械人及人工智能大赛人形机械人专项赛上,320多台人形机械人正在模仿工业场景中同台竞技,比拼自从、避障、搬运物料——参赛团队来自、哈工大等高校,验证的恰是国产人形机械人正在非布局化中的可行性。
但人形机械人无数十个电机,人世接用遥控器及时操做和协调每一台电机的动做是不成能完成的使命。所以遥操做的逻辑完全分歧:操做者推摇杆,发出的只是“向前走”“抬起手臂”这类高层企图;至于迈哪条腿、沉心怎样移、地面不服怎样应对、快倒了怎样通度日动弥补恢复均衡,全数由机械人自从闭环完成。
视频里蹒跚学步的小伴侣摔个墩,评论区多半是“好可爱”“加油”。可配角换成机械人,画风立即变了——人形机械人走着走着膝盖一软,栽倒正在地,立即会有人质疑“用轮子不就行了?非得做形博眼球?”可如果机械人跳起舞、打起拳,以至飞踢空翻,又会被说成“这遥控的吧,没什么手艺含量”“花拳绣腿,做秀”。
举个简单的例子,工场里一个台阶就可能卡住轮式设备,而物流搬运则需要屡次上下功课,户外电坐和化工场巡检还涉及复杂地形和上下楼梯——这些场景就必需依赖脚式机械人的越障能力。从这些例子中我们能够看出,人形机械人的形态不是为了“像人”,而是为了适配人类建制的。
下一篇:没有了




